

{kind=link}
In in the present day’s put up, Bhavik M. Patel from IIT Guwahati shares his strategy to mannequin a snake robotic and take a look at the mannequin with completely different management methods for varied environmental situations. Over to you Bhavik…
Desk of Contents
How did we come throughout this mission?
Who’re we?
What motivated me to review this subject?
I’m immersed within the thrilling area of bio-mimetic robotics, which goals to emulate the adaptability of dwelling creatures in unsure environments. Present analysis on bio-mimetic robots contains movement research, modeling movement dynamics, organic management schemes, bioinspired optimization algorithms, and many others. My focus on this research is on the serpentine movement and its management, as snakes are one of many diversified creatures discovered on land, water, and air. My goal right here is to grasp their movement dynamics and management by using Simscape to simulate a real-time digital testing floor for these robots.
A bit of bit about snake-like robots
Typically, we will observe the snake’s attribute serpentine or lateral undulation movement whereas it strikes on land or underwater. This movement is used for the event of the snake robotic on this mission. Throughout the robotic, actuators play a vital function in producing joint movement. Attaining a coordinated serpentine movement requires all joints to function in sync, necessitating using a controller for joint movement management. It’s value mentioning that snake robots with N hyperlinks possess joints and (N + 2) levels of freedom, leading to an under-actuated system, which presents an intriguing management problem.
Hyperlinks and Joints
The underlying modeling of the snake robotic block, with hyperlinks and joint connections, is illustrated in Determine 1. I used a revolute joint between subsequent hyperlinks, the place every hyperlink is created from the solid-block perform. This link-joint construction makes up the under-actuated system which has 9 hyperlinks, 8 joints, and 11 levels of freedom.
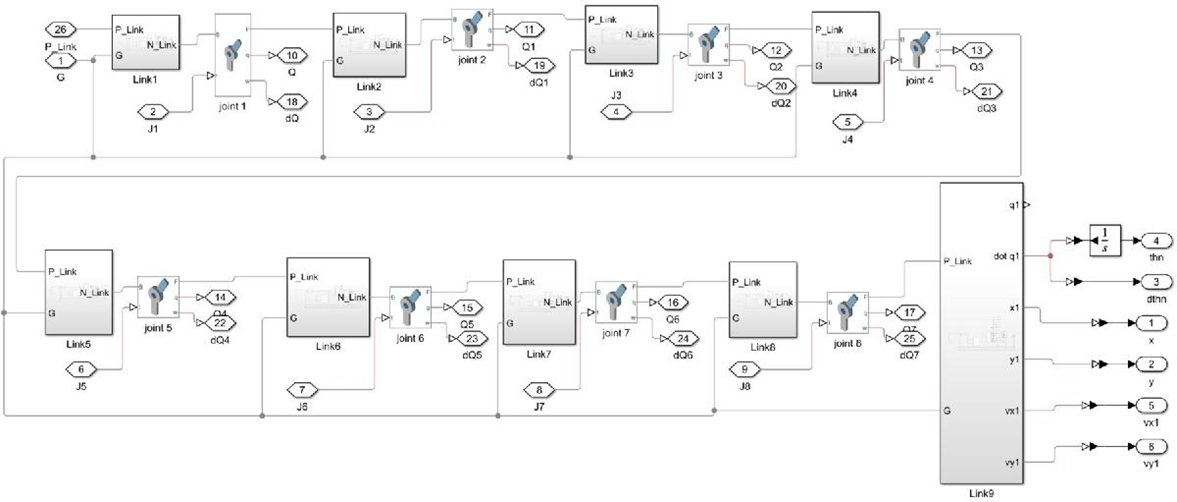
Determine 1: Snake modeling in Simscape
Interplay between snake and floor
For real-world situations, I thought-about joint frictions inside the Simscape revolute joint blocks. This friction represents the interplay between the snake robotic’s hyperlinks and the floor and is chargeable for driving the robotic’s movement. This frictional pressure is inherently nonlinear and may be utilized to every hyperlink by way of the planar joint, which basically acts as some extent of contact between the robotic’s hyperlinks and the floor.
Body of reference
A rework sensor is used for measuring the states of every hyperlink. The measurement is taken into account on this planet body for the simplicity of the reason.
Controller Design

Determine 2: Controller modeling in Simulink
The controller is the mind of the robotic. It decides how a robotic ought to transfer within the varied environments primarily based on the acquired suggestions by way of states. Right here, completely different management logics are used for 2 completely different features of the robotic (Joint Management and Head Management), each contributing to its movement.
Joint Management
The joint movement is managed by a PD controller. PD management receives suggestions from the snake robotic joint by way of angle. There’s a want for the reference joint place to trace the joint place of the snake robotic. The joint reference place is generated utilizing the next easy sine wave equation.
the place represents the actual joint and the section angle of the generated serpentine movement.
The pinnacle hyperlink reference joint may be generated utilizing the next equation.
the place is an offset angle. To alter the general path of the robotic, the offset angle () of the pinnacle hyperlink must be adjusted. Then, all the following hyperlinks will then observe accordingly.
The PD controller for every joint is taken into account as given under.
Head Management
The snake robotic strikes on given reference head angle.
Visualizing the snake’s movement

Determine 3: 3D Visualization of the Movement of the Snake Robotic Mannequin
Head hyperlink place in X-Y body

Determine 4: Head hyperlink place in X-Y body
Head angle error monitoring

Determine 5: Head angle error monitoring
Torque on the pinnacle hyperlink joint

Determine 6: Torque on the pinnacle hyperlink joint
A Simscape mannequin for the snake robotic has been designed, the place friction forces are utilized to every hyperlink by way of planar joints. A PD controller manages joint actions, and a separate devoted controller steers the robotic. The Simulink knob features like a distant, figuring out the pinnacle’s path, with the remainder of the robotic following in a train-trail movement.
Utilizing this platform, we might simply take a look at the mannequin with completely different management methods for varied environmental situations with out explicitly implementing the snake robotic dynamics. Therefore, it’s extra user-friendly to implement real-world situations utilizing Simscape.
We want to prolong this mission to digital actuality, sooner or later, the place a vision-based controller may be designed.
Acknowledgments
I thank Dr. Roberto G. Valenti for steady help and dialogue on bettering the snake robotic management scheme and Dr. Monalisa Pal for introducing this wonderful mission.
The feedback for the advance are welcome. Contact: Bhavik M. Patel (bpatel@iitg.ac.in; bpatel2195@gmail.com).
References
- Kohl, A. M., Kelasidi, E., Mohammadi, A., Maggiore, M., & Pettersen, Okay. Y. (2016). Planar maneuvering management of underwater snake robots utilizing digital holonomic constraints. Bioinspiration & biomimetics, 11(6), 065005.
- Mohammadi, A., Rezapour, E., Maggiore, M., & Pettersen, Okay. Y. (2015). Maneuvering management of planar snake robots utilizing digital holonomic constraints. IEEE Transactions on Management Techniques Expertise, 24(3), 884-899.
- Mukherjee, J., Mukherjee, S., & Kar, I. N. (2017). Sliding mode management of planar snake robotic with uncertainty utilizing digital holonomic constraints. IEEE Robotics and Automation Letters, 2(2), 1077-1084.
- Patel, B. M., &, Dwivedy, S.Okay. (2023). Digital holonomic constraints primarily based tremendous twisting sliding mode management for movement management of planar snake robotic within the unsure underwater atmosphere. Proceedings of the Establishment of Mechanical Engineers, Half I: Journal of Techniques and Management Engineering, 237(8),1480-1491.