


{kind=link}
Within the R2022b launch, Picture Processing Toolbox contains a number of new geometric transformation objects, reminiscent of rigidtform2d, affinetform3d, and so forth., that use the premultiply matrix conference as a substitute of the postmultiply conference. A number of different associated toolbox capabilities, reminiscent of imregtform, now preferentially use these new objects. There are capabilities within the Laptop Imaginative and prescient Toolbox and Lidar Toolbox that now use the premultiply conference and new objects. These modifications additionally enhance the design consistency with Robotics System Toolbox and Navigation Toolbox.
For the important thing info within the documentation, see:
In at the moment’s submit, I will clarify how and why this all took place and what distinction it makes to customers.
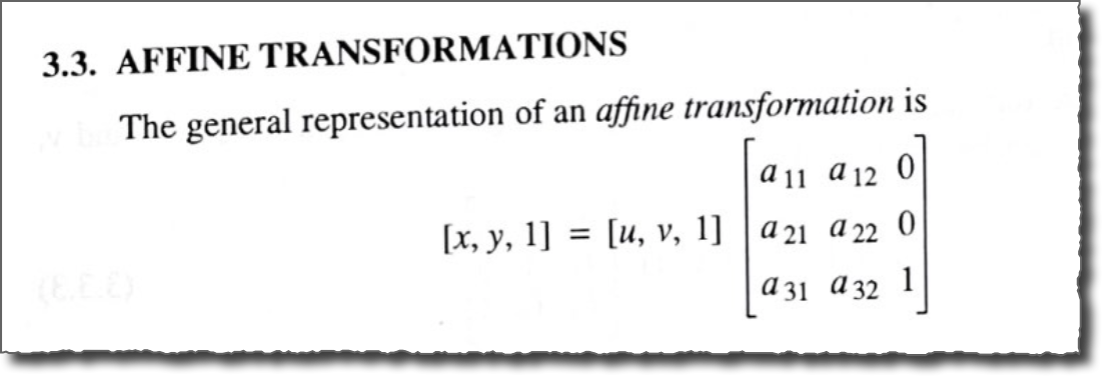
Affine Transformation Matrices
The matrices in query outline affine and projective transformations, together with translations, rotations, inflexible, and similarity transformations. I will give attention to affine transformations within the following dialogue, however the identical ideas apply to projective transformations.
For 2 dimensions, an affine transformation matrix is a $ 3 instances 3 $ matrix that maps a two-dimensional level, $ (u,v) $, utilizing matrix multiplication, like this:
When the affine transformation is written as above, the third row of A is at all times . As a result of the matrix seems earlier than the vector it’s multiplying, I will name this the premultiply conference.
There’s one other strategy to write this operation. You may transpose all the things, like this:
On this type, the matrix seems after the vector, and so I will name this the postmultiply conference. Notice that A and B are associated by matrix transposition: $ A = B^{T} $, and $ B = A^{T} $.
Competing Conventions
The primary Picture Processing Toolbox launch that included general-purpose geometric picture transformation capabilities was developed from about 1999 to 2001. At the moment, most of the most helpful publications discussing the geometric transformation of pictures had been within the laptop graphics literature. Each of the matrix conventions, premultiply and postmultiply, had been in use. Which conference you discovered relied on which books and papers you learn, or which graphics software program framework you used, reminiscent of OpenGL or DirectX.
I used to be influenced on the time by the e-book Digital Picture Warping, by George Wolberg, which used the postmultiply conference. I additionally thought that the postmultiply conference labored properly with the standard MATLAB conference of representing P two-dimensional factors as a $ P instances 2 $ matrix.
Due to these influences, the preliminary toolbox capabilities, maketform and imtransform, in addition to the subsequent era of capabilities, imwarp and affine2d and others, used the postmultiply conference.
Deciding to Change the Conference
New Geometric Transformation Sorts
The R2022b launch of Picture Processing Toolbox introduces these new sorts:
- projtform2d – 2-D projective geometric transformation
- affinetform2d – 2-D affine geometric transformation
- simtform2d – 2-D similarity geometric transformation
- rigidtform2d – 2-D inflexible geometric transformation
- transltform2d – 2-D translation geometric transformation
- affinetform3d – 3-D affine geometric transformation
- simtform3d – 3-D similarity geometric transformation
- rigidtform3d – 3-D inflexible geometric transformation
- transltform3d – 3-D translation geometric transformation
We encourage everybody to start out utilizing these as a substitute of the sooner set of sorts: projective2d, affine2d, rigid2d, affine3d, and rigid3d.
Utilizing the New Sorts
Once you make one of many new transformation sorts from a change matrix, use the premultiplication type. For an affine matrix in premultiplication type, the underside row is .
A = [1.5 0 10; 0.1 2 15; 0 0 1]
tform = affinetform2d(A)
tform.A
To ease the transition, the brand new sorts are meant to be interoperable, as a lot as potential, with code that was written for the previous sorts. For instance, let’s check out the previous perform, affine2d:
T = A’
tform_affine2d = affine2d(T)
tform_affine2d.T
For the previous sorts, the T property is the transformation matrix in postmultiply type. For the brand new sorts, the A property is the transformation matrix in premultiply type.
Though it’s hidden, the brand new sorts even have a T property, and this property comprises the transformation matrix in postmultiply type.
tform
tform.A
tform.T
This hidden property is there in order that, if in case you have code that will get or units the T property on the previous sort, it is possible for you to to make use of the brand new sort with out altering that code. Setting or getting the T property will robotically set or get the corresponding A property.
tform.T
tform.A
Translation, Inflexible, and Similarity Transformations
Along with the generic affine transformation, the brand new sorts embody the extra specialised transformations translation, inflexible, and similarity. You may create these utilizing parameters which may be extra intuitive than the affine transformation matrix. For instance, a inflexible transformation is a mixture of rotation and translation, and so you’ll be able to create a rigidtform2d object by specifying a rotation angle (in levels) and a translation vector immediately.
r_tform = rigidtform2d(45,[0.2 0.3])
If you happen to ask for R (the rotation matrix) or A (the affine transformation matrix), it’s computed immediately from the rotation and translation parameters.
r_tform.R
r_tform.A
You may change these matrices immediately, however provided that the outcome can be a sound inflexible transformation. The next project, which solely modifications the horizontal translation offset, is permitted as a result of the outcome continues to be a inflexible transformation:
r_tform.A(1,3) = 0.25
However when you attempt to change the upper-left $ 2 instances 2 $ submatrix in order that it isn’t a rotation matrix, you will get an error:

Remodeling Factors and Pictures
Remodeling factors and pictures works in the identical means as with the previous objects.
[x,y] = transformPointsForward(r_tform,2,3)
[u,v] = transformPointsInverse(r_tform,x,y)
The next code generates 100 pairs of random factors, transforms them utilizing r_tform from above, after which plots line segments from the unique factors to the reworked ones.
uv = transformPointsForward(r_tform,xy);
plot([xy(k,1) uv(k,1)],[xy(k,2) uv(k,2)])
axis equal
And imwarp interprets the brand new transformation sorts utilizing the identical syntax as earlier than.
A = imread(“peppers.png”);
imshow(B)
Associated Toolboxes
- Picture Processing Toolbox
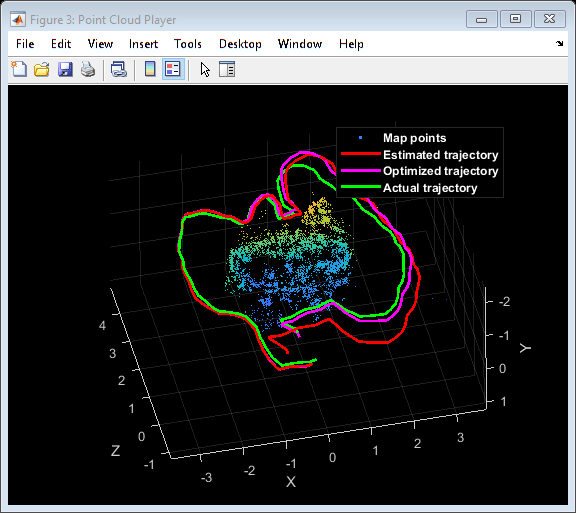
- Laptop Imaginative and prescient Toolbox
- Automated Driving Toolbox
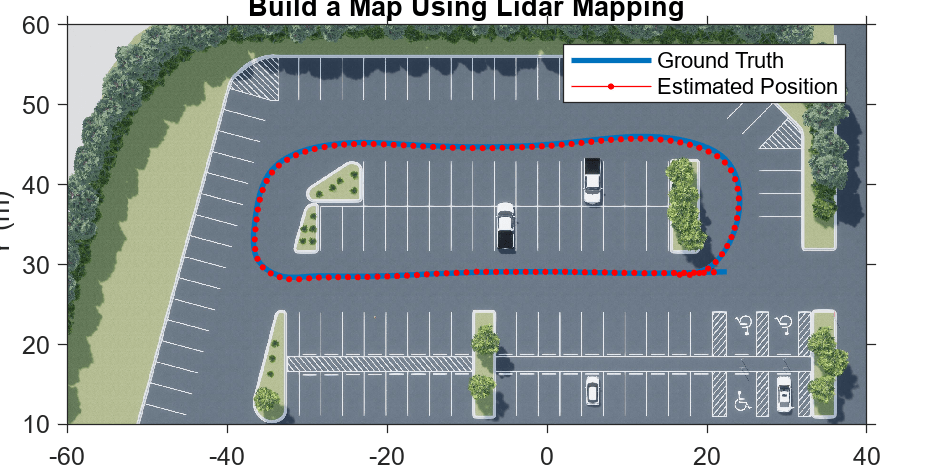
- Lidar Toolbox
Here is a sampling:
Credit
Alex, thanks for being my Picture Processing Toolbox design buddy; your expertise was invaluable. Vignesh, thanks for advising me about code era. Ashish, thanks for rescuing me on the final minute with essential implementation assist. Jessica did a beautiful job with the in depth documentation and instance updates throughout all 4 merchandise. And Abhi helped stage and qualify the ultimate multiproduct integration underneath a good deadline.
THANKS TO ALL!